
列车智能控制技术研究所科研项目
时间:2025-08-04 阅读次数: 作者:柴铭
1. 高速磁浮运行控制系统关键技术研究及装备研制(国家自然科学基金——高铁联合基金,U173420030)
高速列车自动驾驶可以在保障安全的前提下提升运行效率、提高乘客舒适度、减少列车运行能耗,是高速铁路未来发展的重要方向。我国高速铁路线路环境复杂、站间运行距离长,列车动力分散、编组方式多样,本项目紧密围绕高速列车自动驾驶面临的高速列车智能驾驶策略优化理论与方法、基于多控制单元的高速列车协调运行控制的稳定性、高速列车司机驾驶绩效与关键操纵要素的耦合机理等理论与实践中尚未解决的科学问题,重点开展高速列车智能驾驶控制建模、基于学习控制的高速列车节能驾驶控制方法、面向动力分散的高速列车多控制单元协调控制、基于认知结构理论的高速列车驾驶作业人机功能分配、高速列车自动驾驶仿真实验与验证等方面的研究,具有深远的科学意义和重大的应用价值,研究成果将为我国高速铁路实现自动化、智能化提供理论基础和关键技术支撑。
本项目拟围绕高速列车自动驾驶核心基础理论与关键问题,研究高速列车智能驾驶策略优化理论与方法,提出高速列车智能驾驶控制建模方法与基于学习控制的高速列车节能驾驶控制方法;研究高速列车司机驾驶绩效与关键操纵要素的耦合机理,提出基于认知结构理论的人机功能分配模型;研究基于多控制单元的高速列车协调运行控制稳定性,提出面向动力分散的高速列车多控制单元协同控制方法,形成高速列车自动驾驶的一整套理论方法与技术。高速列车自动驾驶理论与关键技术研究具有重要的理论和实际应用意义。一方面可为实现高速列车自动驾驶控制,全面提升我国高速铁路运行效率、乘客满意度、减少运行能耗提供重要的理论支撑,为我国高速列车驾驶控制进一步实现自动化、智能化提供技术保障。另一方面,高速列车自动驾驶研究属于多学科交叉研究,涉及了人因分析、列车运行控制、人工智能、协同控制等多个学科领域知识,丰富了非线性、多模态对象的模型建立与优化控制方法与理论,将促进控制科学与工程的发展,对提升我国高速铁路的国际竞争力具有重要的战略意义。
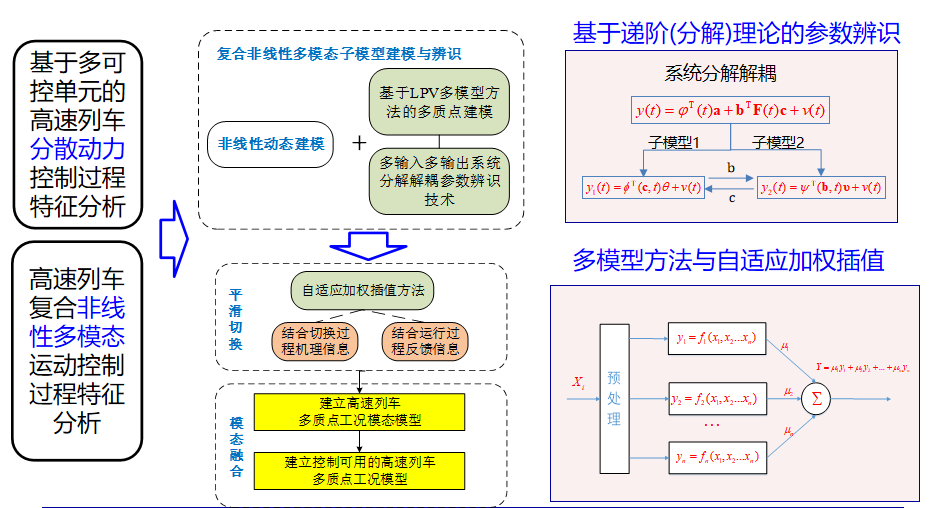
图 面向动力分散控制的高速列车运行控制建模研究
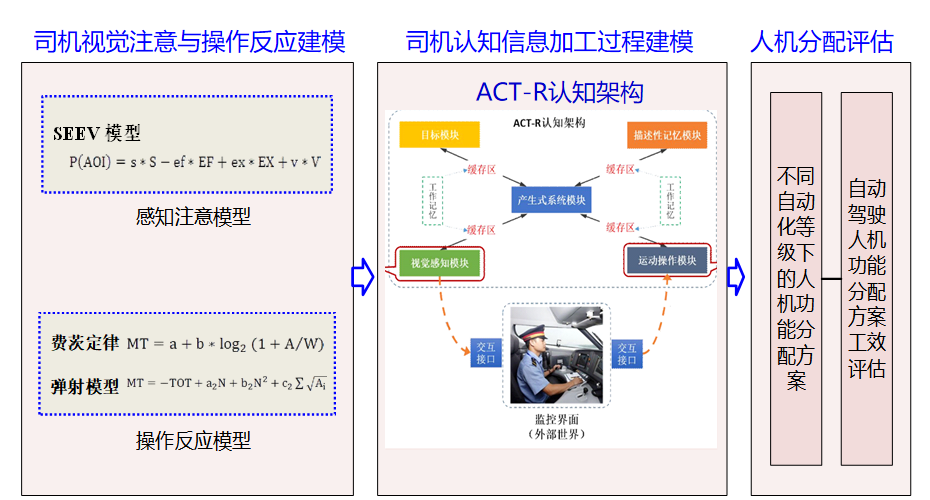
图 基于认知结构理论的高速列车驾驶行为建模与评价